آموزش استفاده از تابع analogWrite() برای کمنور کردن LED در آردوینو:
این آموزش به شما نشان میدهد که چگونه از تابع analogWrite() برای ایجاد اثر کمنور شدن (Fade) یک LED استفاده کنید. این تابع از مدولاسیون عرض پالس (PWM) استفاده میکند، که به معنای روشن و خاموش کردن سریع یک پایه دیجیتال با نسبتهای مختلف روشنایی و خاموشی است.
قطعات مورد نیاز که در تصویر زیر امده است:
برای این پروژه، به قطعات زیر نیاز دارید:
1 عدد بردبرد (Breadboard)
1 عدد آردوینو Uno R3
1 عدد LED
1 عدد مقاومت 330 اهم
2 عدد سیم جامپر
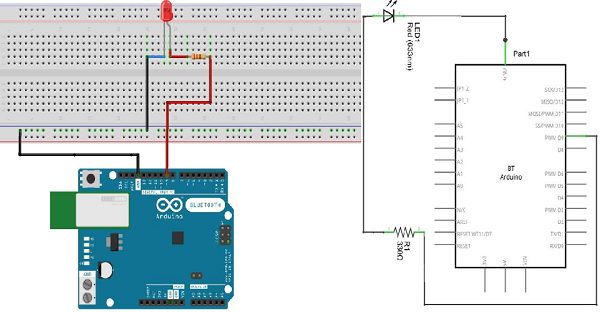
نحوه اتصال قطعات
از بردبرد برای اتصال قطعات استفاده کنید.
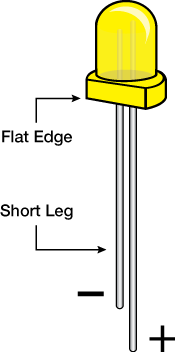
پایه بلندتر LED به عنوان پایه مثبت (آند) و پایه کوتاهتر به عنوان پایه منفی (کاتد) عمل میکند. پایه منفی را به مقاومت 330 اهم وصل کنید.
مقاومت را به پایه GND آردوینو متصل کنید.
پایه مثبت LED را به پایه دیجیتال 9 آردوینو وصل کنید.
تمامی اتصالات را طبق دیاگرام انجام دهید.
نکته: برای اطمینان از اتصال صحیح LED، به شکل پایهها دقت کنید. پایه کوتاهتر به سمت لبه صاف LED اشاره میکند و کاتد یا پایه منفی است.
کد برنامه:
سنسورهای مادون قرمز (IR) امکان تشخیص حرکت را فراهم میکنند. از این سنسورها برای شناسایی ورود یا خروج یک انسان از محدودهی سنسور استفاده میشود. این سنسورها معمولاً در وسایل و گجتهایی که برای مصارف خانگی یا تجاری استفاده میشوند، یافت میشوند. برخی از نامهای متداول این سنسورها عبارتاند از:
PIR (Passive Infrared)
Pyroelectric
IR Motion Sensors
چگونگی عملکرد PIR
سنسورهای PIR از حسگرهای پیروالکتریک ساخته شدهاند. این حسگرها معمولاً به شکل یک استوانهی فلزی با کریستال مستطیلشکلی در مرکز هستند که سطوح تابش مادون قرمز را شناسایی میکنند.
تابش مادون قرمز: همه اجسام مقدار کمی تابش از خود ساطع میکنند. هرچه دمای جسم بالاتر باشد، میزان تابش آن بیشتر است.
تقسیم سنسور به دو بخش: حسگر در سنسورهای حرکتی به دو قسمت تقسیم میشود تا تغییرات تابش را شناسایی کند، نه میانگین کلی آن. این دو نیمه به گونهای طراحی شدهاند که یکدیگر را خنثی کنند. اگر یکی از نیمهها تابش بیشتری یا کمتری را دریافت کند، خروجی سنسور به حالت HIGH یا LOW تغییر میکند.
کاربردها
سنسورهای PIR برای پروژهها یا دستگاههایی که نیاز به تشخیص ورود یا خروج افراد از یک منطقه دارند، عالی هستند. برخی از کاربردهای آن عبارتاند از:
تشخیص حرکت در ورودیها و خروجیها: استفاده در چراغهای خودکار.
امنیت خانه و محیطهای کاری: فعالسازی آلارمها در صورت شناسایی حرکت.
اتوماسیون خانگی: روشن شدن دستگاهها در صورت ورود به اتاق.
محدودیتها
سنسور PIR نمیتواند تعداد افراد حاضر در محیط یا فاصلهی آنها از سنسور را مشخص کند.
لنز سنسور معمولاً به زاویهی خاصی تنظیم شده و ممکن است در اثر حرکت حیوانات خانگی تحریک شود.
مدار و کد نمونه برای استفاده از سنسور PIR
قطعات مورد نیاز:
1 عدد آردوینو (مثلاً Uno R3)
1 عدد سنسور PIR
3 عدد سیم جامپر
منبع تغذیه
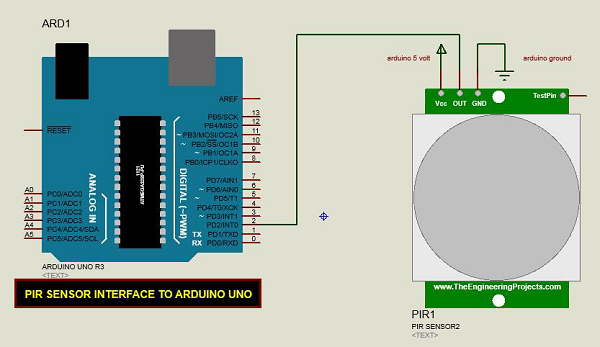
اتصالات:
پایههای سنسور PIR:
VCC: به 5V آردوینو متصل کنید.
GND: به پایه GND آردوینو متصل کنید.
OUT: به یکی از پایههای دیجیتال آردوینو (مثلاً D2) متصل کنید.
کد نمونه
معرفی موتورهای پلهای (Stepper Motors) و کدنویسی آن با آردوینو
موتور پلهای چیست؟

موتورهای پلهای نوعی موتور بدون براش و همزمان هستند که یک چرخش کامل را به تعدادی پله تقسیم میکنند. برخلاف موتورهای DC که با ولتاژ ثابت به طور پیوسته میچرخند، موتور پلهای به صورت زاویههای گسسته حرکت میکند.
ویژگیها:
تعداد پلهها در هر دور چرخش موتور میتواند متفاوت باشد (مثلاً 12، 24، 72 و غیره).
زاویه هر پله بسته به طراحی موتور ممکن است 30، 15، 5، 2.5 و حتی 1.8 درجه باشد.
این موتور میتواند با یا بدون فیدبک کنترل شود.
کاربرد موتورهای پلهای
موتور پلهای در دستگاههایی که نیاز به حرکت دقیق دارند، استفاده میشود. برخی کاربردهای رایج:
پرینترها: حرکت دقیق برای چاپ خطوط متن یا تصاویر.
کنترلهای مکانیکی: حرکت محورها با اندازههای مشخص.
دستگاههای CNC: برای برشهای دقیق.
چگونگی کارکرد موتور پلهای
بر خلاف موتورهای DC معمولی که فقط در یک جهت میچرخند، موتور پلهای میتواند در زاویههای دقیق یا پلههای مشخص حرکت کند. این قابلیت به شما امکان کنترل کامل موتور را میدهد تا بتوانید آن را به محل دقیق منتقل کرده و در همان مکان ثابت نگه دارید.
چالش: باید موتور همیشه تغذیه شود تا در موقعیت مشخص باقی بماند، که ممکن است مصرف انرژی بیشتری داشته باشد.
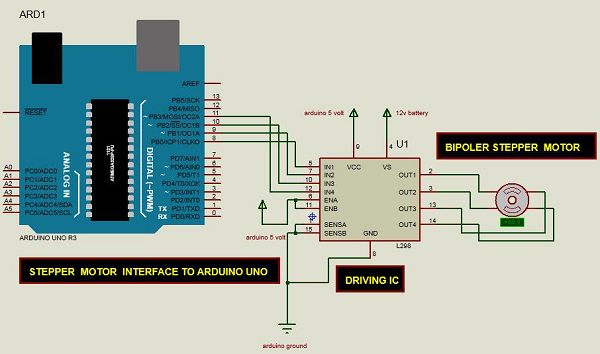
مدار مورد نیاز
قطعات مورد نیاز:
1 عدد برد آردوینو Uno
1 عدد موتور پلهای کوچک دو قطبی
1 عدد IC درایور LM298
نحوه اتصال:
موتور پلهای را به IC درایور LM298 وصل کنید.
خروجیهای LM298 را به پایههای مشخص شده در برد آردوینو متصل کنید (پایههای 8، 9، 10 و 11).
تغذیه مناسب برای موتور و مدار فراهم کنید.
کدنویسی کنترل موتور پلهای
کد زیر برای کنترل موتور پلهای با استفاده از کتابخانه Stepper است:
درخواست مشاوره
برای کسب اطلاعات بیشتر درباره این دوره درخواست مشاوره خود را ارسال کنید و یا با ما در تماس باشید.
درخواست مشاورهدوره های مرتبط

دوره هوش مصنوعی با PICTOBLOX
🚀 دوره جامع آموزش هوش مصنوعی با PictoBlox 🤖 💡 یادگیری هوش مصنوعی و یادگیری ماشین برای همه! بدون نیاز…

هوش مصنوعی با MIT App Inventor
دوره تخصصی هوش مصنوعی با MIT App Inventor 🤖📱 این دوره آموزشی ویژه، به طراحی و توسعه اپلیکیشنهای هوشمند در…
هوش مصنوعی با PICTOBLOX
🚀✨ معرفی دوره آموزشی پایتون در محیط PictoBlox ✨🚀 🎯 این دوره به شما آموزش میدهد که چگونه برنامهنویسی با…

بسته ربات نوریاب با بدنه خودرویی
🚗🤖 یک ربات جذاب برای شروع دنیای الکترونیک! 🔧⚡
این بسته کامل 🎁 شامل بدنه مقاوم و تجهیزات الکترونیکی 🛠️ برای ساخت یک ربات آموزشی جذاب است! 😍 این ربات قابلیت استفاده از آداپتور، باتری قلمی 🔋 و باتری شارژی 🔌 را دارد. در این نسخه، ربات با آداپتور تغذیه میشود، بنابراین یک سیم بلند همراه آن است 🏆✨
اگر به یادگیری الکترونیک علاقه دارید 🎓🔍 و میخواهید یک ربات بدون نیاز به برنامهنویسی 💡 ولی با سیمکشی فنی و کارگاهی 🛠️ بسازید، این بسته ایدهآل شماست! 🚀 ربات شما به شکل یک خودروی کوچک و کاربردی 🏎️ طراحی شده تا با ساخت آن، مهارتهای فنی خود را تقویت کنید! 💪🎯 شروع کنید و اولین ربات خود را بسازید! 🔥🚗
نظرات
75,000 تومان

حسین رضایی
مدرس رباتیک، الکترونیک، برنامه نویسیمدیر موسسه پیشروخلاقیت آزاد مهر ویرا