توضیحات
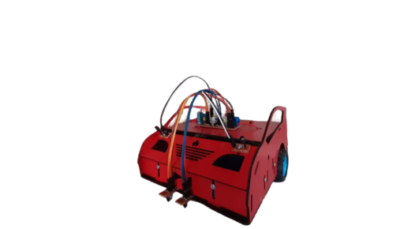
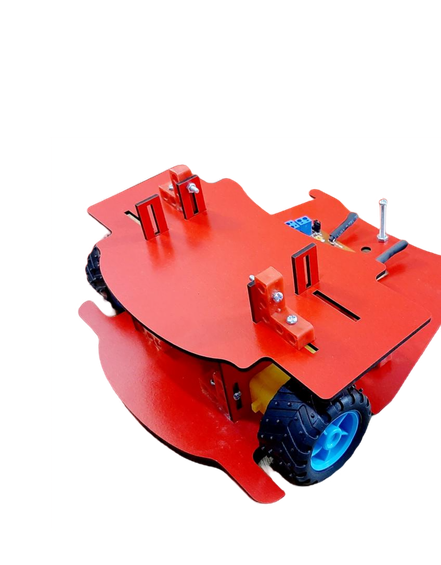
🚀 بدنه ربات نوریاب ساده – اقتصادی، مقاوم و مناسب برای آموزش! 🤖
🔹 بدنه ربات نوریاب ساده یک شاسی آموزشی مقرونبهصرفه است که برای ساخت انواع رباتهای آموزشی مانند نوریاب، مسیریاب و مینیاب طراحی شده است. 🎓⚙️ این بدنه از MDF سه میل برشخورده دقیق 🪵 ساخته شده و بهراحتی مونتاژ میشود. 💡 ویژگیها: ✅ دو موتور DC پرقدرت ⚡ – حرکت سریع و دقیق 🏎️ ✅ هرزگرد جلویی 🔄 – حفظ تعادل در مسیرهای مختلف 🛤️ ✅ ساختار مقاوم و سبک 🏗️ – ایدهآل برای پروژههای دانشآموزی 👦👧 ✅ قیمت اقتصادی 💰 – بهترین گزینه برای یادگیری و آموزش 🏆 🚀 این بدنه یک انتخاب عالی برای علاقهمندان به رباتیک است که میخواهند با کمترین هزینه، یک ربات آموزشی کاربردی بسازند! 🤖🔥آشنایی با قطعات الکترونیکی ربات نور یاب:
🔌📡 آشنایی با قطعات الکترونیکی برای ربات نوریاب ⚡🔋
سلام دوستای خلاق! 🤩 توی این بخش میخوایم قطعات مهم الکترونیکی رو به زبان ساده بشناسیم. هر قطعه وظیفهای داره که توی مدارهای الکترونیکی به ما کمک میکنه. بزن بریم! 🚀✨
🔋 1. خازن (Capacitor)
📌 کاربرد: ذخیره و آزادسازی انرژی الکتریکی در مدارها.
📌 شکل: معمولا دو پایه داره و میتونه استوانهای یا تخت باشه.
📌 نکته: بعضی خازنها قطب مثبت و منفی دارن و باید درست توی مدار قرار بگیرن.
💡 2. دیود (Diode)
📌 کاربرد: برق رو فقط در یک جهت عبور میده، مثل یک شیر یکطرفه! 🚦
📌 شکل: یه قطعه کوچیک با دو پایه که یک طرفش نوار سفید یا نقرهای داره.
📌 نکته: جهت دیود خیلی مهمه! اگه برعکس بذاری، کار نمیکنه.
⚡ 3. ترانزیستور (Transistor)
📌 کاربرد: تقویت یا قطع و وصل کردن جریان توی مدار. مثل کلید برق اما هوشمند! 🤖
📌 شکل: معمولا سه پایه داره و میتونه از نوع PNP یا NPN باشه.
📌 نکته: پایههاش شامل بیس (B)، کلکتور (C) و امیتر (E) هستن.
🧠 4. آپ امپ 358 (Op-Amp 358)
📌 کاربرد: تقویت سیگنالهای الکتریکی و استفاده در مدارهای حسگر. 🎛️
📌 شکل: یه آیسی (IC) با 8 پایه که توی مدارهای هوشمند به کار میره.
📌 نکته: میتونه برای تقویت ولتاژ، فیلتر کردن نویز و مقایسه سیگنالها استفاده بشه.
🎚️ 5. پتانسیومتر (Potentiometer)
📌 کاربرد: تنظیم مقدار ولتاژ یا شدت صدا، نور و…
📌 شکل: یه قطعه چرخشی با سه پایه که مقدار مقاومتش تغییر میکنه. 🔄
📌 نکته: اگه روی اسپیکر ولوم دیده باشی، اونم یه جور پتانسیومتره! 🔊
🎨 6. مقاومت (Resistor)
📌 کاربرد: محدود کردن جریان توی مدار.
📌 شکل: یه قطعه کوچیک با نوارهای رنگی که مقدارش رو مشخص میکنه.
📌 مقاومتهای پرکاربرد:
🔹 1KΩ (1 کیلو اهم): قهوهای – مشکی – قرمز – طلایی 🎨
🔹 10KΩ (10 کیلو اهم): قهوهای – مشکی – نارنجی – طلایی 🎨
🔹 220Ω (220 اهم): قرمز – قرمز – قهوهای – طلایی 🎨
🔹 0Ω (مقاومت صفر اهم): یه خط مشکی داره و مثل سیم کار میکنه!
🔌 7. سوکت و جامپر (Socket & Jumper)
📌 کاربرد: اتصال قطعات به برد بدون لحیمکاری.
📌 جامپرها: سیمهایی با سرهای پلاستیکی که راحت وصل و جدا میشن. 🔄
📌 سوکتها: محل قرارگیری قطعات روی برد که بدون لحیم بشه ازشون استفاده کرد.
🌞 8. حسگر نور (Light Sensor)
📌 کاربرد: اندازهگیری شدت نور و کنترل روشنایی. 🌅
📌 مثال: توی لامپهای هوشمند که با تاریک شدن هوا روشن میشن.
🛠️ نتیجهگیری:
همه این قطعات با هم کار میکنن تا مدارهای هوشمند و جذاب بسازیم. پس آماده شو که با این قطعات، پروژههای خفن الکترونیکی بسازی! 🚀✨
تنظیم نهایی و راه اندازی ربات:
🚀 راهنمای راهاندازی ربات نوریاب 🌞🤖
در این بخش، مراحل راهاندازی ربات نوریاب را بهصورت ساده و مرحلهبهمرحله توضیح میدهیم تا بتوانید ربات خود را به درستی تنظیم کنید.
1️⃣ اتصال باتریها 🔋
✅ جاباتریها را به مدار متصل کنید.
✅ دقت کنید که سیم مثبت (+) و منفی (-) را به درستی وصل کنید تا از آسیب دیدن مدار جلوگیری شود.
2️⃣ روشن کردن ربات 🔄
✅ جامپر روشن/خاموش (ON/OFF) را تنظیم کنید:
- اگر در حالت ON باشد، ربات روشن خواهد شد.
- در حالت OFF، ربات خاموش میماند.
3️⃣ تنظیم حساسیت حسگر نور 🌞
✅ ربات باید به نور محیط حساس باشد، برای این کار:
- پتانسیومترها را تنظیم کنید.
- هر پتانسیومتر مخصوص یکی از چرخهای ربات است.
- اگر ربات حرکت نامناسبی دارد، مقدار پتانسیومتر را تغییر دهید تا در آستانهی روشن شدن قرار بگیرد.
- ربات را طوری تنظیم کنید که فقط با دریافت نور اضافی شروع به حرکت کند.
4️⃣ تنظیم جهت حرکت چرخها 🏎️
✅ چرخهای ربات باید به سمت جلو بچرخند.
✅ اگر چرخش آنها اشتباه است:
- سیمهای موتور را در سوکت هر چرخ جابهجا کنید.
🎯 جمعبندی
- باتریها را به درستی وصل کنید.
- ربات را با جامپر روشن/خاموش کنترل کنید.
- حساسیت حسگر نور را با پتانسیومترها تنظیم کنید.
- جهت چرخش موتورها را بررسی و در صورت نیاز سیمها را جابهجا کنید.
📢 حالا ربات شما آماده حرکت به سمت نور است! 🚀🌞