سلام دوستان! امروز میخواهیم یاد بگیریم که چطور یک موتور DC رو با استفاده از درایور L298N و جویاستیک کنترل کنیم. این کار خیلی جالبه و بهتون کمک میکنه پروژههای رباتیکی خودتون رو بسازید. 😃
🎯 وسایل مورد نیاز:
✅ آردوینو UNO
✅ ماژول درایور موتور L298N
✅ دو عدد موتور DC (۱۲ ولت)
✅ جویاستیک
✅ باتری ۳ عدد ۱۸۶۵۰ لیتیوم-یون (۳.۷ ولت)
✅ سیمهای جامپر
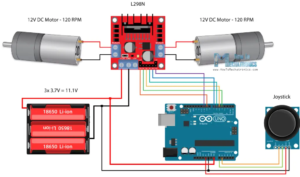
🛠️ مرحله ۱: آشنایی با ماژول L298N
ماژول L298N یک درایور دو کاناله است که میتواند دو موتور DC را بهطور همزمان کنترل کند. این ماژول دارای ترمینالهای خروجی برای اتصال موتورها و پینهای کنترلی برای کنترل جهت و سرعت آنها است.
🔌 مرحله ۲: اتصالات مدار
حالا وقتشه که اتصالات رو انجام بدیم! 👇
۱. اتصال موتورها به L298N
🔹 موتور سمت چپ را به خروجی Motor A درایور متصل کنید.
🔹 موتور سمت راست را به خروجی Motor B درایور متصل کنید.
۲. اتصال تغذیه (برق)
⚡ توجه: مراقب باشید که ولتاژها را اشتباه وصل نکنید، چون ممکنه مدار آسیب ببینه!
🔺 باتری ۱۸۶۵۰ (۳ عدد) بهصورت سری بسته شدهاند و ۱۱.۱ ولت خروجی دارند.
🔹 سیم قرمز (مثبت) را به +12V درایور L298N متصل کنید.
🔹 سیم مشکی (منفی) را به GND درایور متصل کنید.
🔹 همچنین، پین ۵V درایور را به 5V آردوینو وصل کنید.
۳. اتصال درایور L298N به آردوینو
🔸 پینهای کنترل موتور A:
🟢 IN1 ➝ پین 6 آردوینو
🔵 IN2 ➝ پین 7 آردوینو
🔸 پینهای کنترل موتور B:
🟢 IN3 ➝ پین 8 آردوینو
🔵 IN4 ➝ پین 9 آردوینو
🔸 پینهای سرعت (PWM):
⚡ ENA ➝ پین 10 آردوینو
⚡ ENB ➝ پین 11 آردوینو
۴. اتصال جویاستیک به آردوینو
🎮 جویاستیک برای کنترل سرعت و جهت حرکت استفاده میشود.
🔹 VRX (خروجی محور X) ➝ پین A0 آردوینو
🔹 VRY (خروجی محور Y) ➝ پین A1 آردوینو
🔹 GND ➝ GND آردوینو
🔹 VCC ➝ 5V آردوینو
🏆 مرحله ۳: کدنویسی آردوینو
حالا که اتصالات انجام شد، باید کد آردوینو رو بنویسیم تا جویاستیک بتونه موتورها رو کنترل کنه. شما میتونید از این کد ساده استفاده کنید:
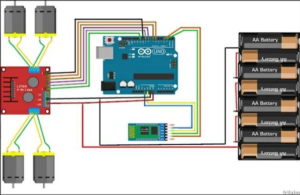
🚀 کنترل ربات با بلوتوث و آردوینو
حالا میخوایم ربات خودمون رو با بلوتوث کنترل کنیم! توی این پروژه، با استفاده از ماژول بلوتوث HC-05 یا HC-06 و اپلیکیشن موبایل، میتونیم ربات رو در جهات مختلف هدایت کنیم. 😃
🎯 ایده کلی
✅ موبایل به ماژول بلوتوث متصل میشود.
✅ از طریق اپلیکیشن، فرمانهای F, B, L, R, S ارسال میشود.
✅ آردوینو این فرمانها را خوانده و به L298N ارسال میکند.
✅ موتورها طبق دستورات حرکت میکنند.
🛠️ اتصالات مدار
۱. اتصال موتورها به L298N
🔹 دو موتور سمت چپ به خروجی Motor A وصل شوند.
🔹 دو موتور سمت راست به خروجی Motor B وصل شوند.
۲. اتصال تغذیه
🔺 باتریها (۶ عدد AA = ۹V) به +12V و GND درایور متصل شوند.
🔺 GND درایور به GND آردوینو متصل شود.
🔺 5V درایور به 5V آردوینو متصل شود.
۳. اتصال L298N به آردوینو
✅ IN1 → پین 6
✅ IN2 → پین 7
✅ IN3 → پین 8
✅ IN4 → پین 9
✅ ENA (PWM) → پین 10
✅ ENB (PWM) → پین 11
۴. اتصال ماژول بلوتوث (HC-05 / HC-06)
✅ VCC → 5V آردوینو
✅ GND → GND آردوینو
✅ TX (بلوتوث) → پین 10 آردوینو
✅ RX (بلوتوث) → پین 11 آردوینو
⚠️ نکته: چون ماژول بلوتوث با ۳.۳ ولت کار میکند، بهتر است از یک مقاومت تقسیمکننده روی RX آن استفاده کنیم.
🚀 پروژه ربات نوریاب با آردوینو و L298N
در این پروژه، ربات به سمت نور حرکت میکند! 🌞🚗
ما از دو حسگر نور (LDR) برای تشخیص شدت نور در دو سمت استفاده میکنیم. اگر سمت چپ نور بیشتری دریافت کند، ربات به چپ میچرخد و برعکس. در ادامه دو مرحله داریم:
1️⃣ تست حسگرهای نور و نمایش مقدار آنها در سریال مانیتور
2️⃣ راهاندازی ربات نوریاب بر اساس مقدار حسگرها
🛠️ سیمکشی و مدار ربات نوریاب
۱. اتصال دو حسگر نور (LDR) به آردوینو
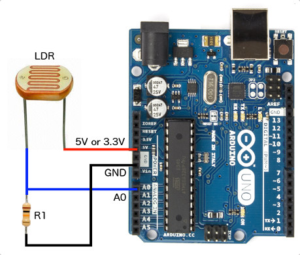
🔹 LDR1 → به A0 متصل شود
🔹 LDR2 → به A1 متصل شود
🔹 یکی از پایههای هر LDR به 5V متصل شود
🔹 پایه دیگر به GND از طریق مقاومت 10KΩ و همچنین به ورودیهای A0 و A1 متصل شود
۲. اتصال موتور درایور L298N به آردوینو
✅ IN1 → پین 6
✅ IN2 → پین 7
✅ IN3 → پین 8
✅ IN4 → پین 9
✅ ENA (PWM) → پین 10
✅ ENB (PWM) → پین 11
✅ GND به GND آردوینو
✅ +12V از باتری
۱. تست مقدار حسگرهای نوری در سریال مانیتور
این کد مقدار نور هر حسگر را در سریال مانیتور نمایش میدهد:
معرفی ماژول BFD-1000 برای رباتهای مسیریاب
ماژول BFD-1000 یک سنسور چندکاره است که برای تشخیص خطوط، موانع و لمس استفاده میشود. این ماژول بهویژه برای رباتهای تعقیب خط (Line Following Robots) و رباتهای هوشمند اجتناب از موانع مناسب است.
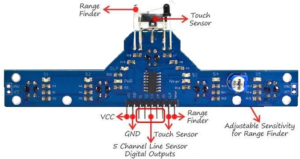
ویژگیهای اصلی ماژول BFD-1000
پنج سنسور تشخیص خط (S1 تا S5)
این سنسورها از نوع TCRT5000 هستند که با ارسال مادون قرمز و دریافت بازتاب آن، تفاوت بین سطوح تیره (مشکی) و روشن (سفید) را تشخیص میدهند.
برای رباتهای مسیریاب کاربرد دارد.
حسگر فاصلهی مادون قرمز (Range Finder)
این حسگر موانع جلوی ربات را تشخیص میدهد.
حساسیت آن قابل تنظیم است و میتواند برای جلوگیری از برخورد با موانع در مسیر استفاده شود.
حسگر لمسی (CLP)
با فشار دادن این حسگر، یک خروجی دیجیتال فعال میشود.
اتصالات الکتریکی
VCC: اتصال به منبع تغذیه (۳.۰ تا ۵.۵ ولت).
GND: اتصال به زمین (GND).
S1 تا S5: خروجی سنسورهای خط.
Range Finder: خروجی حسگر فاصله.
CLP: خروجی حسگر لمسی.
بخش دوم: برنامهنویسی ربات مسیریاب
حالا که با این ماژول آشنا شدیم، بریم سراغ برنامهنویسی یک ربات تعقیب خط با آردوینو! 🚀
💡 سختافزار مورد نیاز:
ماژول BFD-1000
برد آردوینو (UNO یا Mega)
دو موتور DC به همراه درایور موتور (L298N یا L293D)
چرخها و بدنهی ربات
باتری ۷.۴ ولت یا ۱۲ ولت



درخواست مشاوره
برای کسب اطلاعات بیشتر درباره این دوره درخواست مشاوره خود را ارسال کنید و یا با ما در تماس باشید.
درخواست مشاورهدوره های مرتبط

دوره آموزشی اینترنت اشیاء
دوره آموزشی اینترنت اشیاء: معرفی اینترنت اشیا (Internet of Things – IoT) اینترنت اشیا چیست؟اینترنت اشیا یا IoT مفهومی است…

ساخت ربات امدادگرمحیط زیست
دوره ساخت ربات امدادگر محیط زیست، آموزش طراحی و ساخت رباتهایی است که برای کمک به حفظ و مراقبت از طبیعت ساخته میشوند. در این دوره، مهارتهای مکانیک، الکترونیک و برنامهنویسی ترکیب شده تا رباتهایی طراحی شود که قادر به تشخیص و واکنش به مشکلات محیطی مانند آلودگی یا شرایط خطرناک باشند. این دوره به نوجوانان فرصتی میدهد تا با فناوری، نقش فعالتری در حفاظت از محیط زیست ایفا کنند.

پک ربات ورزشکار
این ربات دارای چندین قابلیت فعالیت ورزشی می باشد. برداشتن وزنه و حمل آن، ضربه زدن به توپ و پرتاب…

دوره آموزش ساخت بردهای الکترونیکی
دوره ساخت بردهای الکترونیکی، طراحی، نقشهخوانی و مونتاژ مدارها را آموزش میدهد و مهارت لحیمکاری و استفاده از قطعات را برای پروژههای رباتیک و الکترونیک فراهم میکند. مناسب علاقهمندان به الکترونیک و مهندسی سختافزار.
نظرات

دکتر حسین رضایی
مدرس رباتیک، الکترونیک، برنامه نویسیمدیر موسسه پیشروخلاقیت آزاد مهر ویرا