توضیحات
معرفی کلی بردهای ESP:
بردهای ESP خانوادهای قدرتمند و پرکاربرد از میکروکنترلرها هستند که توسط شرکت Espressif Systems توسعه داده شدهاند و به دلیل برخورداری از قابلیتهای ارتباطی داخلی مانند Wi-Fi و در بسیاری از مدلها Bluetooth / Bluetooth Low Energy (BLE)، به یکی از انتخابهای اصلی در پروژههای اینترنت اشیا (IoT)، اتوماسیون، الکترونیک هوشمند و رباتیک تبدیل شدهاند.
این بردها با ترکیب قدرت پردازشی مناسب، مصرف انرژی بهینه، قیمت اقتصادی و پشتیبانی نرمافزاری گسترده، امکان پیادهسازی پروژههای ساده تا پیشرفته را برای دانشآموزان، دانشجویان، پژوهشگران و توسعهدهندگان حرفهای فراهم میکنند.
خانوادهها و مدلهای مختلف ESP:
خانواده ESP شامل مدلها و سریهای متنوعی است که هرکدام برای کاربردهای خاصی طراحی شدهاند، از جمله:
ESP8266:
گزینهای اقتصادی و محبوب برای پروژههای ساده IoT با Wi-Fi داخلیESP32:
نسل پیشرفتهتر با هستههای پردازشی قویتر، Wi-Fi و Bluetooth، تعداد GPIO بیشتر و امکانات جانبی گستردهESP32-S / ESP32-C / ESP32-H:
خانوادههای تخصصیتر با تمرکز بر امنیت، مصرف انرژی پایین، ارتباطات خاص یا کاربردهای صنعتی
این تنوع باعث میشود طراح بتواند بر اساس نیاز پروژه، توان پردازشی، مصرف انرژی و نوع ارتباطات، برد مناسب را انتخاب کند.
ورودیها، خروجیها و امکانات سختافزاری:
بردهای ESP از انواع مختلف پایههای ورودی و خروجی (GPIO) پشتیبانی میکنند و امکاناتی مانند:
ورودی آنالوگ (ADC)
خروجی آنالوگ (PWM / DAC در برخی مدلها)
ارتباطات سریال (UART، SPI، I2C)
تایمرها و وقفهها
پشتیبانی از سنسورها، نمایشگرها و ماژولهای متنوع
را در اختیار توسعهدهنده قرار میدهند که آنها را برای پروژههای متنوع بسیار انعطافپذیر میسازد.
روشهای برنامهنویسی بردهای ESP:
بردهای ESP از روشها و محیطهای برنامهنویسی مختلفی پشتیبانی میکنند، از جمله:
Arduino IDE (محبوبترین و سادهترین روش)
PlatformIO
ESP-IDF (چارچوب رسمی Espressif برای توسعه حرفهای)
MicroPython (در برخی مدلها)
Lua (در نسخههای خاص)
این تنوع محیطها باعث میشود هم کاربران مبتدی و هم توسعهدهندگان حرفهای بتوانند بهراحتی با این بردها کار کنند.
کتابخانهها و پشتیبانی نرمافزاری:
یکی از نقاط قوت اصلی بردهای ESP، اکوسیستم نرمافزاری گسترده آنهاست. هزاران کتابخانه آماده برای:
اتصال به Wi-Fi و Bluetooth
ارتباط با سنسورها و ماژولها
پروتکلهای IoT مانند MQTT و HTTP
کنترل نمایشگرها و عملگرها
در دسترس است که سرعت توسعه پروژهها را بهطور چشمگیری افزایش میدهد و نیاز به کدنویسی از پایه را کاهش میدهد.
مشخصات برد Wemos D1 R32:
مشخصات برد Wemos D1 R32 (خلاصه)
مبتنی بر ESP32
سازگار با فرمفکتور Arduino UNO
دارای LED داخلی (معمولاً روی پایه GPIO2)
مراحل آمادهسازی در Arduino IDE
از مسیر File → Preferences، در بخش Additional Boards Manager URLs این آدرس را اضافه کنید:
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json
از Tools → Board → Boards Manager، پکیج ESP32 by Espressif Systems را نصب کنید.
برد را روی WEMOS D1 R32 یا در صورت نبود، ESP32 Dev Module تنظیم کنید.
پورت (COM) مناسب را انتخاب کنید.
کد مثال چشمکزن (Blink):
// Blink example for Wemos D1 R32 (ESP32)
#define LED_PIN 2 // LED داخلی برد (GPIO2)
void setup() {
pinMode(LED_PIN, OUTPUT); // تنظیم پایه LED بهعنوان خروجی
}
void loop() {
digitalWrite(LED_PIN, HIGH); // روشن شدن LED
delay(1000); // مکث 1 ثانیه
digitalWrite(LED_PIN, LOW); // خاموش شدن LED
delay(1000); // مکث 1 ثانیه
}
مشخصات فنی برد توسعه WeMos D1 R32 – ESP32:
برد توسعه WeMos D1 R32 – ESP32 یک برد قدرتمند و چندمنظوره مبتنی بر ماژول ESP32-WROOM-32 است که با طراحی سازگار با آردوینو، گزینهای ایدهآل برای پروژههای اینترنت اشیا (IoT)، رباتیک، هوش مصنوعی و سیستمهای هوشمند آموزشی و صنعتی محسوب میشود.
🔧 ویژگیهای سختافزاری
ولتاژ کاری: 3.3 ولت
جریان کاری: تا 500 میلیآمپر
ابعاد برد: 70 × 55 میلیمتر
میکروکنترلر: ESP32-WROOM-32
پردازنده:
Xtensa® 32-bit LX6 دو هستهای با توان پردازشی تا 600 DMIPSحافظه فلش داخلی:
4 مگابایت (32 مگابیت)حافظه RAM: 520 کیلوبایت SRAM
📡 ارتباطات بیسیم
Wi-Fi: استاندارد 802.11 b/g/n
Bluetooth: نسخه 4.2 (BLE و Classic)
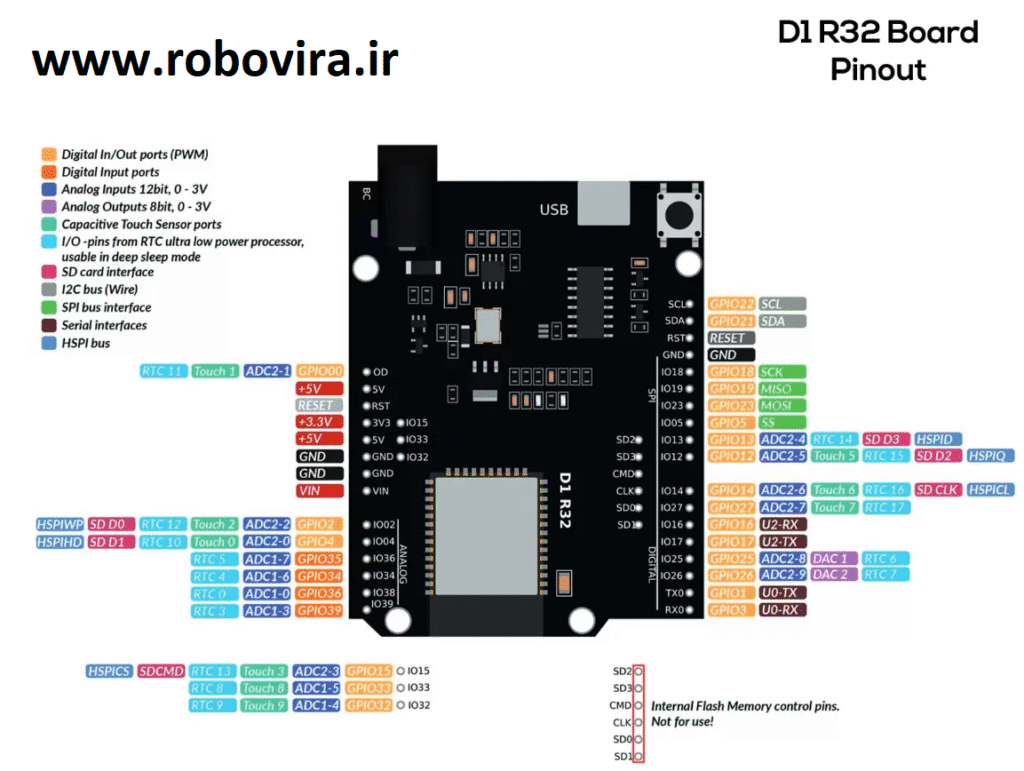
🔌 پینها و رابطها
پینهای ورودی/خروجی (GPIO):
مطابق دیاگرام استاندارد برد (سازگار با فرمفکتور Arduino UNO)پشتیبانی از:
PWM
ADC
UART
I2C
SPI
🔋 تغذیه و رابطها
جک آداپتور تغذیه: دارد
رابط USB:
Micro USB برای تغذیه و برنامهنویسیرگولاتور داخلی: مناسب برای تأمین ولتاژ پایدار 3.3V
نحوه راهاندازی و استفاده از برد WeMos D1 R32 – ESP32
برای شروع کار با این برد، مراحل زیر را انجام دهید:
برد را با استفاده از کابل Micro USB به کامپیوتر متصل کنید.
در صورت نیاز، درایور USB مربوطه را نصب نمایید.
نرمافزار Arduino IDE (یا محیطهای سازگار مانند PlatformIO) را اجرا کنید.
از بخش Board Manager، پکیج ESP32 by Espressif Systems را نصب کنید.
برد WeMos D1 R32 (ESP32) را از منوی Board انتخاب نمایید.
برنامه نمونه (مانند Blink) را بارگذاری کرده و اجرای صحیح برد را بررسی کنید.
پس از اطمینان از عملکرد، میتوانید برد را در پروژههای مختلف خود ادغام نمایید.
📌 برای آشنایی بیشتر با پینها، قابلیتها و مثالهای کاربردی، مراجعه به مستندات رسمی ESP32 و دیتاشیت برد توصیه میشود.
کاربردهای پیشنهادی
پروژههای اینترنت اشیا (IoT)
رباتیک آموزشی و پیشرفته
سیستمهای هوشمند خانگی
پردازش دادههای سنسوری
آموزش برنامهنویسی و الکترونیک
ارتباطات بیسیم و کنترل از راه دور
معرفی پایه ها:
پروژه ساخت ربات کنترلی:
برای راهاندازی ربات، لازم است برنامه (کد) ابتدا روی برد WeMos D1 R32 – ESP32 آپلود شود.
این برنامه دستورات کنترلی را که از طریق اپلیکیشن موبایل (بلوتوث) ارسال میشوند دریافت کرده و بر اساس آن، موتورها، سرووها، LEDها و بازر را کنترل میکند.
مراحل کلی:
اتصال برد به کامپیوتر با کابل Micro USB
انتخاب برد WeMos D1 R32 (ESP32) در Arduino IDE
آپلود کد ربات روی برد
نصب اپلیکیشن کنترل ربات روی موبایل
اتصال بلوتوث و کنترل ربات
📱 دانلود اپلیکیشن کنترل ربات:
🔗 دانلود MIT App Inventor Companion (اندروید):
کد برنامه:
#include <Servo.h>
/* ===== LED ها ===== */
#define LED1 0
#define LED2 2
#define LED3 13
#define LED4 15
#define LED5 14
/* ===== موتور چپ ===== */
#define LM1 5
#define LM2 4
#define LM_EN 12
/* ===== موتور راست ===== */
#define RM1 14
#define RM2 13
#define RM_EN 15
/* ===== بازر ===== */
#define BUZZER 16
/* ===== سرووها ===== */
#define SERVO_ARM 2 // U / D
#define SERVO_GRIP 0 // A / b
Servo armServo;
Servo gripServo;
int armPos = 90;
int gripPos = 90;
char command;
/* ===== توابع حرکتی ===== */
void stopAll() {
digitalWrite(LM1, LOW);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, LOW);
}
void forward() {
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
void backward() {
digitalWrite(LM1, LOW);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, LOW);
digitalWrite(RM2, HIGH);
}
void turnLeft() {
digitalWrite(LM1, LOW);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
void turnRight() {
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, HIGH);
}
/* ===== سروو ===== */
void armUp() {
armPos = min(armPos + 5, 170);
armServo.write(armPos);
}
void armDown() {
armPos = max(armPos - 5, 10);
armServo.write(armPos);
}
void gripOpen() {
gripPos = min(gripPos + 5, 170);
gripServo.write(gripPos);
}
void gripClose() {
gripPos = max(gripPos - 5, 10);
gripServo.write(gripPos);
}
/* ===== LED Dance ===== */
void ledDance() {
int leds[] = {LED1, LED2, LED3, LED4, LED5};
for (int i = 0; i < 5; i++) {
digitalWrite(leds[i], HIGH);
delay(100);
digitalWrite(leds[i], LOW);
}
}
/* ===== موزیک ===== */
void playMusic() {
tone(BUZZER, 1200, 200);
delay(250);
tone(BUZZER, 1600, 200);
}
/* ===== پردازش فرمان ===== */
void processCommand(char cmd) {
switch (cmd) {
case 'F': forward(); break;
case 'B': backward(); break;
case 'L': turnLeft(); break;
case 'R': turnRight(); break;
case 'S':
stopAll();
noTone(BUZZER);
break;
case 'U': armUp(); break;
case 'D': armDown(); break;
case 'A': gripOpen(); break;
case 'b': gripClose(); break; // b کوچک
case 'M': playMusic(); break;
case 'E': ledDance(); break;
}
}
void setup() {
Serial.begin(9600);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(LM_EN, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
pinMode(RM_EN, OUTPUT);
pinMode(BUZZER, OUTPUT);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
pinMode(LED5, OUTPUT);
digitalWrite(LM_EN, HIGH);
digitalWrite(RM_EN, HIGH);
armServo.attach(SERVO_ARM);
gripServo.attach(SERVO_GRIP);
armServo.write(armPos);
gripServo.write(gripPos);
stopAll();
}
void loop() {
if (Serial.available()) {
command = Serial.read();
processCommand(command);
}
}